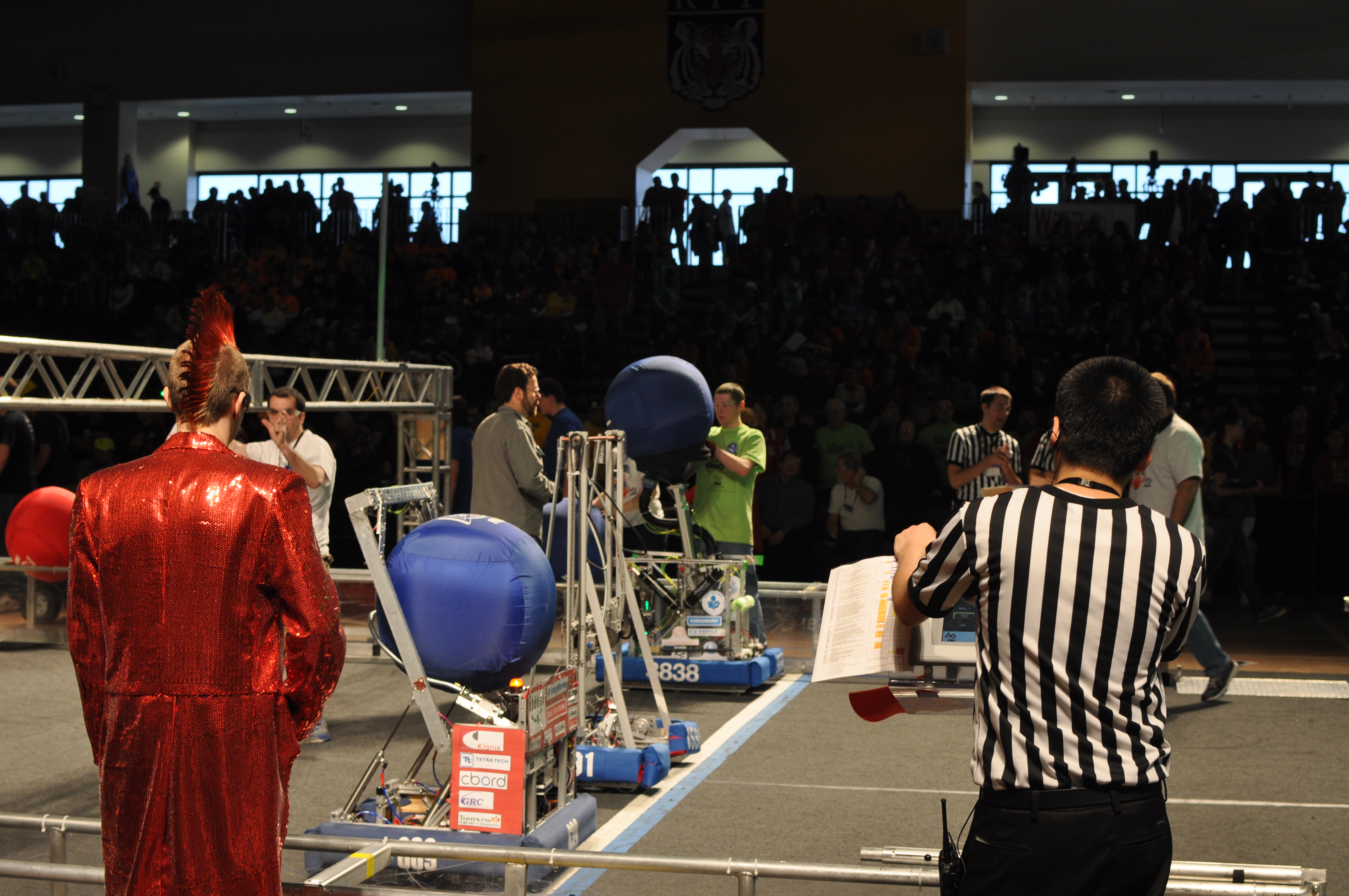
Congratulations to the team for competing at the 2014 Rochester Finglerlakes Regional held at RIT. While we did not place well, we did receive many complements on our robot. It did not help that we were competing against teams that had participated in earlier events. They had an extra day to work out their bugs and two days of competition. We’ll have to have a better strategy for next year.
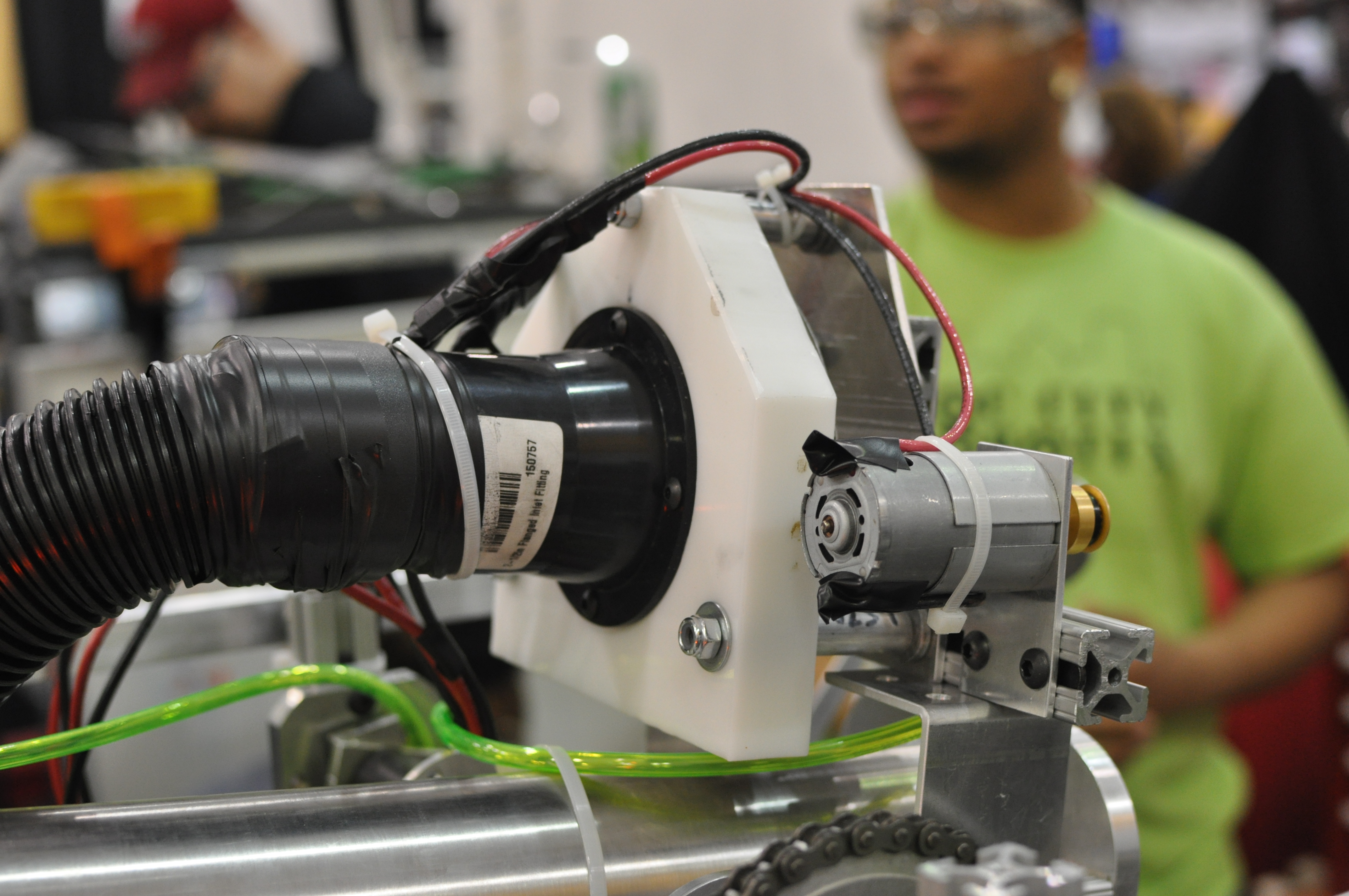
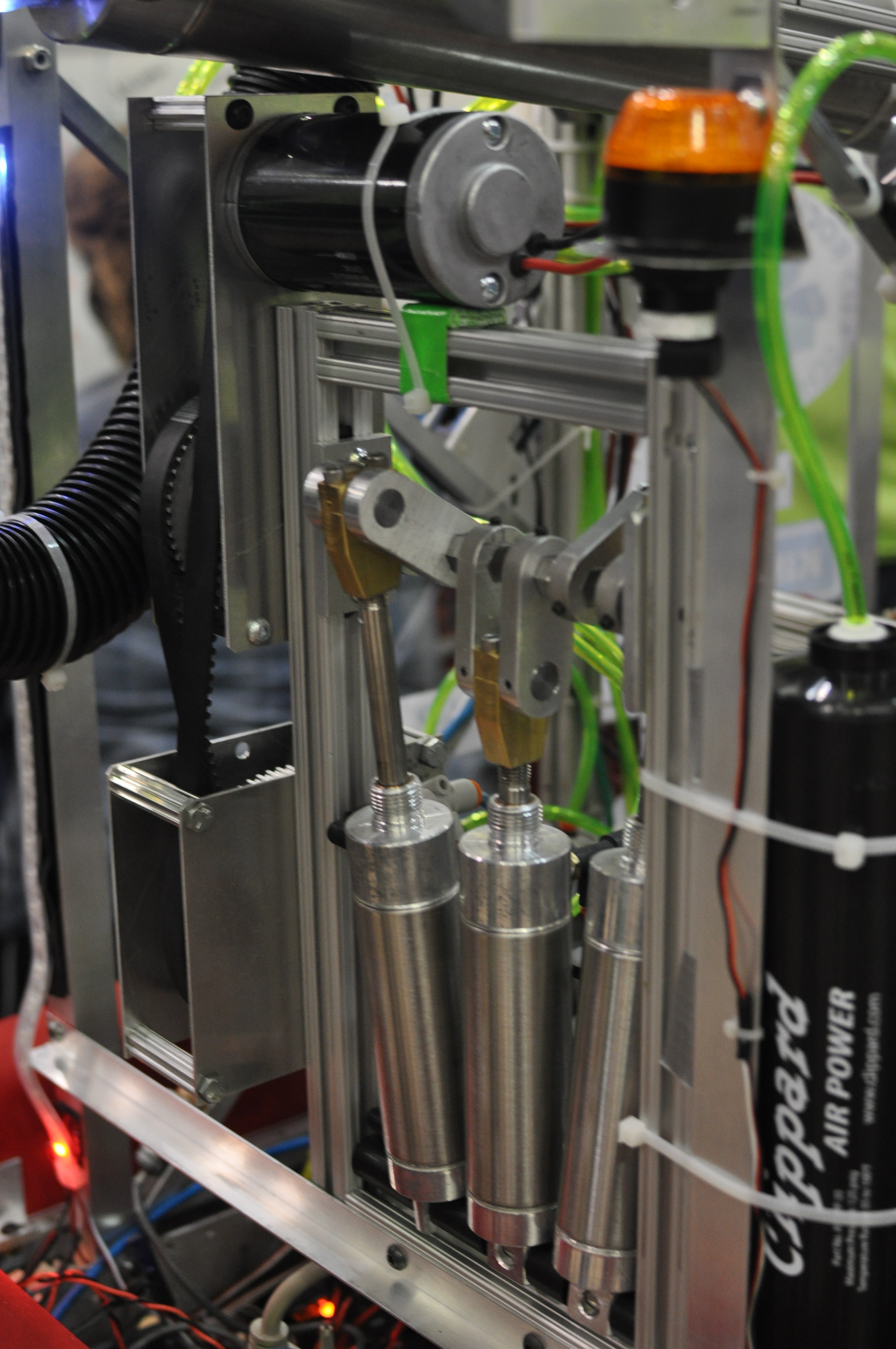
It also did not help to have serious hardware issues. Dropping the 5V due to a bad connection to the digital I/O sidecar cost us most of Thursday’s practice and further hindered the software debugging. Then to have intermittent reboots on the field due to a bad main circuit breaker / switch put us in a huge hole that we struggled to get out of. In the end we managed to shoot once, and we also picked up a ball, and received a ball. But we never used the flippers, removed the netting before trying them, and probably hurt our ability to pick up and receive by reducing the vacuum by inserting the valve. It was still fun.
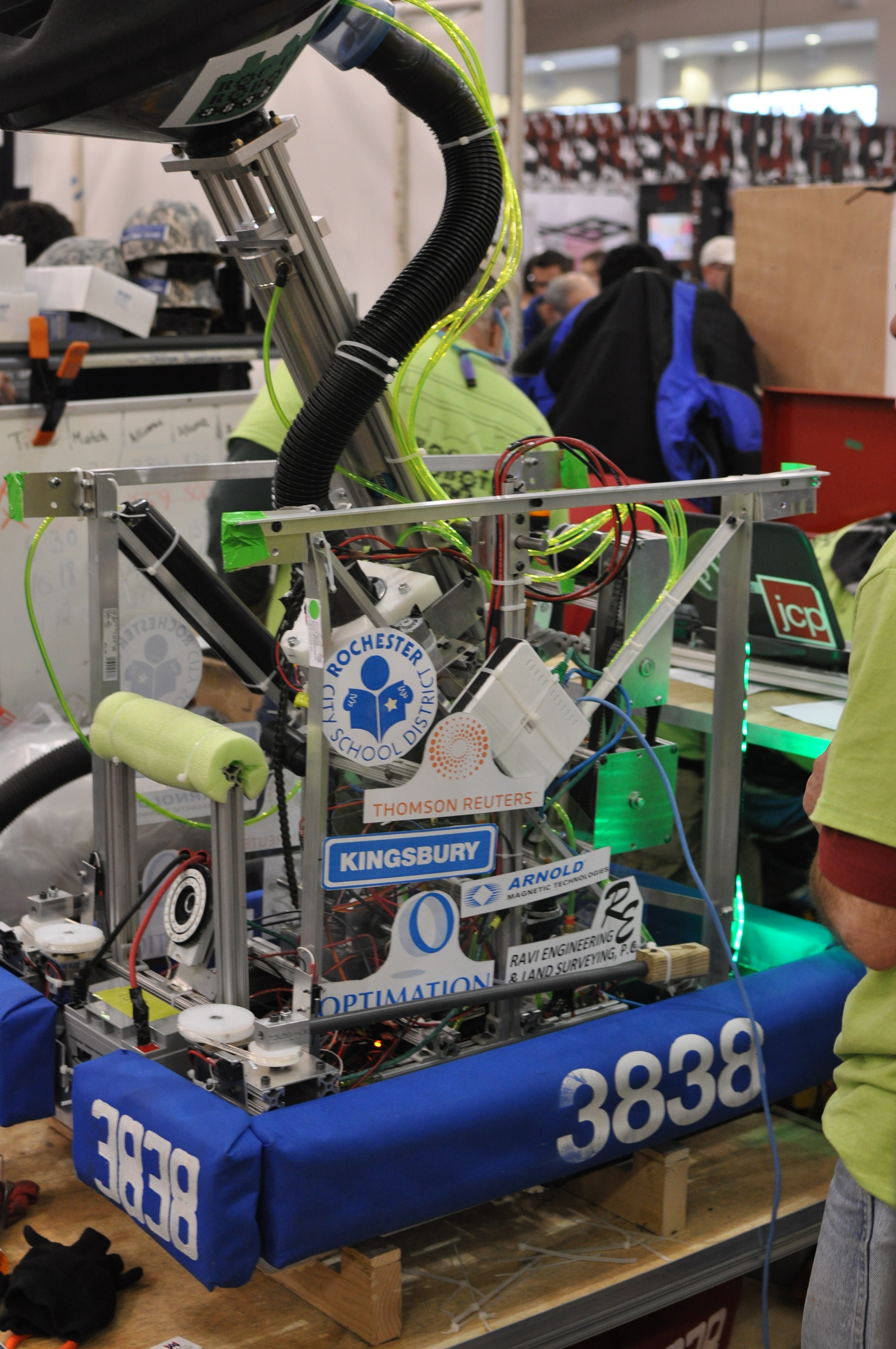
We thank our sponsors, The Rochester City School District (RCSD), Thomson Reuters, Ravi Engineering & Land Surveying P.C., Arnold Magnetic Technologies, Optimation, and Kingsbury.